Pick and Place Unit Rotary Indexers for Small Part Handling
No Comments - Leave a Comment
There are many options today when it comes transporting small parts from one place to another in an automated process; cartesian robots, 3 axis scara robots, pneumatic cylinders to name a few. One of the most robust, reliable and repeatable methods of pick and placing is well designed and manufactured cam system.
Synchronized cam systems have been around for hundreds of years and are extremely reliable and long lasting when implemented into automated processes. Yes, there is the limitation of changing rotation angles and lift strokes once the cams have been manufactured. However, how often do automated processes change once they are in production? Most Pick and Place Rotary Indexer mechanisms are utilized to pick from one area and transport it to a different part of the automated line in the fastest, most accurate method possible. The great majority of these applications stay the same for many years, so flexibility is most likely not required for these types of applications. If different end effectors are required for a new part being processed on the same line, they can be mounted on cam indexing pick and place units, just the same as when using a scara robot or any other pick and place rotary indexing device.

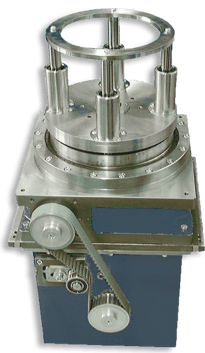
PH Pick and Place Unit.
When a synchronized cam pick and place is chosen for an automated process, the commissioning time is cut down tremendously, because it is not relying on extensive programming to achieve the pick and place motion. Furthermore, the cam systems are extremely robust and downtime do to a mechanical or programming issue on this type of pick and place are almost non-existent.

GH Pick and Place Unit
All Motion Index Drives Pick and Place Units Rotary Indexers use zero backlash cam/cam follower technology. Whether the pick and place are using barrel, globoidal or flat cams, each has a mechanical modified sinusoidal curve machined into it to achieve a very smooth transfer of the part. Since these are mechanically synchronized cam systems, they are operated on one gear motor and are 100% repeatable without the use of servo motors, encoders or external switches to determine position. The gear motor can be controlled with simple motor contactors or a simple VFD.
RT+VT
View more information to Selecting a Rotary Indexer.
Comments
No Comments - Leave a Comment